自动驾驶学习资料合集
教学视频
综合
百度和优达学城合作课程(入门推荐)
MIT自动驾驶访谈(主要是一些业界大神的分享)
2. 定位
书籍
1.综合
《无人驾驶原理与实践》 兰州大学的自动驾驶团队,作为我开始入门无人驾驶的书籍,值得推荐
《无人驾驶:人工智能如何颠覆汽车》 书比较薄,和上本类似,入门推荐
《第一本无人驾驶技术书》入门推荐
《自动驾驶技术概论》 北京航空航天大学和百度自动驾驶事业群组联合编写
2. Planning
《PLANNING ALGORITHMS》 规划算法介绍,英文版
3.高精度地图和定位
《视觉SLAM十四讲》高精度地图和定位需要的基础知识
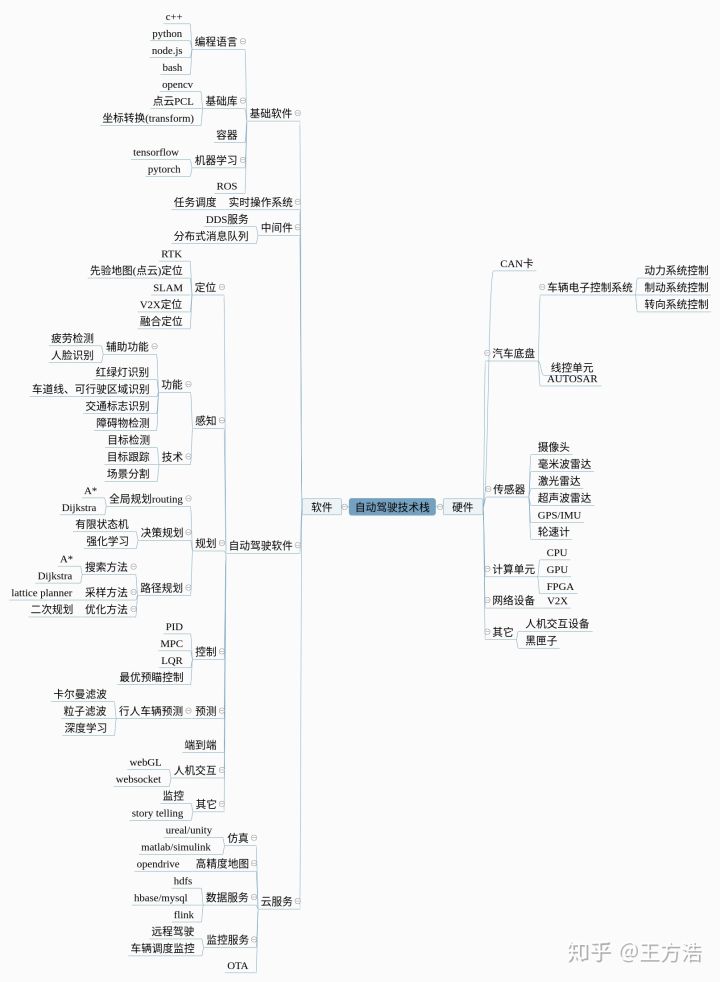
自动驾驶技术栈[1]
这里主要对自动驾驶技术做了硬件和软件2个大类的划分,图片如果不清晰可以查看思维导图原图链接
开源项目
开源项目也是学习的重要方面
1.全栈
2. 仿真
数据集
驾驶数据集
KITTI 目前最知名的自动驾驶数据集之一,一些创业公司都会拿里面的数据进行排名比赛。
Cityscapes 目标是理解街景的语义,主要是针对城市街景做语义解析。
Mapillary 是一个由位于瑞典马尔默的Mapillary AB开发,用来分享含有地理标记照片的服务。其创建者想要利用众包的方式来把整个世界(不仅是街道)以照片的形式存储。
comma.ai's Driving Dataset 目的是低成本的自动驾驶方案,目前是通过手机改装来做自动驾驶,开源的数据主要是行车记录仪的数据。
Udacity's Driving Dataset 优达学城的自动驾驶数据集,优达学城真的是业界良心,希望国内也多点靠谱的网课。
Washington DC's Lidar Data 看起来像是亚马逊的数据?
Apolloscape 百度的自动驾驶数据集,有很多复杂场景的道路,同意用数据要同意很长一段声明。
BDDV Berkeley的大规模自动驾驶视频数据集。
Oxford RobotCar 对牛津的一部分连续的道路进行了上百次数据采集,收集到了多种天气、行人和交通情况下的数据,也有建筑和道路施工时的数据。1000小时以上。
nuscenes aptiv提供的数据集,带标注,宣称是目前最大的数据集之一,资源在Amazon S3,目前被墙,后面看是否做个镜像。
2. 交通标志数据集
KUL Belgium Traffic Sign Dataset 比利时的一个交通标志数据集。
German Traffic Sign 德国交通标注数据集 。
STSD 超过20 000张带有20%标签的图像,包含3488个交通标志。
LISA 超过6610帧上的7855条标注。
Tsinghua-Tencent 100K 腾讯和清华合作的数据集,100000张图片,包含30000个交通标志实例。
论文
论文下载
论文下载强烈推荐,感谢这个网站的作者。
removing barriers in the way of science
2. 自动驾驶综述
Self-Driving Cars: A Survey
Towards Fully Autonomous Driving: Systems and Algorithms
A Survey of Autonomous Driving: Common Practices and Emerging Technologies
3. 定位
下面总结了目前主流的定位方法,以及其优缺点,参考"A Survey of Autonomous Driving: Common Practices and Emerging Technologies"需要的自取
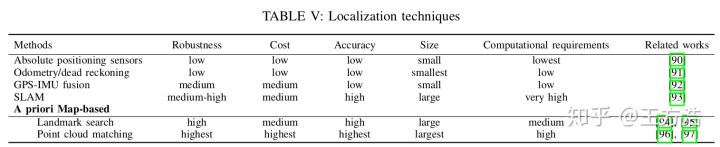
1.state-of-art定位综述
A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications
2.SLAM方法在自动驾驶领域应用综述
Simultaneous localization and mapping: A survey of current trends in autonomous driving
3.斯坦福DARPA比赛开山之作,主要是关于SLAM方法
Map-Based Precision Vehicle Localization in Urban Environments Robust Vehicle Localization in Urban Environments Using Probabilistic Maps
4.百度GNSS和点云定位融合方案
Robust and Precise Vehicle Localization based on Multi-sensor Fusion in Diverse City Scenes
4. 感知
计算机视觉在自动驾驶应用综述
Computer Vision for Autonomous Vehicles:Problems, Datasets and State-of-the-Art
2. 物体识别综述
Object Detection With Deep Learning: A Review
50 Years of object recognition: Directions forward
Deep Learning for Generic Object Detection: A Survey
Object Detection in 20 Years: A Survey - 2019
3. 道路和车道识别
Recent progress in road and lane detection: a survey
5.预测
A Review of Tracking, Prediction and Decision Making Methods for Autonomous Driving
6. 规划控制
综述论文
A Survey of Motion Planning and ControlTechniques for Self-driving Urban Vehicles
A Review of Motion Planning Techniques for Automated Vehicles
2. 百度EMplanner论文
Baidu Apollo EM Motion Planner
7. End-to-End
端到端自动驾驶
End to End Learning for Self-Driving Cars - 2016 NVIDIA
8.V2X
v2x测试综述
A Survey of Vehicle to Everything (V2X) Testing
9. DARPA
DARPA城市挑战赛是无人驾驶技术的鼻祖,下面是参赛的队伍发表的论文集
Autonomous Driving in Urban Environments:Boss and the Urban Challenge
Motion Planning in Urban Environments
Junior: Stanford in The Urban Challenge
Odin: Team VictorTango’s entry in the DUC
A Perception-Driven Autonomous Urban Vehicle
Little Ben: The Ben Franklin Racing Team’s Entry in the 2007 DARPA Urban Challenge
Team Cornell’s Skynet: Robust Perception and Planning in anUrban Environment
A Practical Approach to Robotic Design for the DARPA Urban Challenge
Team AnnieWAY’s Autonomous System for the DARPA Urban Challenge 2007
Driving with Tentacles: Integral Structures for Sensingand Motion
Caroline: An Autonomously Driving Vehicle for Urban Environments
The MIT–Cornell Collision and Why It Happened
A Perspective on Emerging Automotive Safety Applications,Derived from Lessons Learned through Participation in the DARPA Grand Challenges
TerraMax: Team Oshkosh Urban Robot
博客
1.资料合集
2.高精度地图
- 用户评论