功能安全学习-Case study: 扭矩安全概念设计(中)
我们接着上篇继续,在确定危害事件和对应的ASIL等级以后,需要基于危害事件确定Safety goal。
5. 制定功能安全目标(Safety goal)
一个功能安全目标可以对应若干个危害事件,需要取其中最高的ASIL等级作为该安全目标的ASIL等级。另外,每个安全目标必须定义一个安全状态(Safety state)。安全状态可以是单独的安全模式,也可以是逐步降级的过程。我们还是按照上次的扭矩安全的例子,继续学习安全目标(Safety goal)如何确定下来?

安全目标要写到什么程度呢?这个问题,我跟几个做功能安全的同事讨论过,是不是在Hazard描述里加上Avoid就行了呢?我个人的理解是要看你具体的分析对象,如果分析的是诸如Hybrid system这类大系统,写Safety goal时,可以按照上面的例子来写。但是如果分析的是子系统,Safety goal时,仍然写到整车层面的安全目标就不是特别合适了。我并不认为这是抠字眼的过程,开发人员能够理解你的安全目标,这是我们做功能安全的目的。ISO2626(第三章,6.4.4)里面关于Safety goal的描述非常到位,要写到相关项的Top level requirements。

我们再举一个例子,高压混合动力系统中的DC/DC部件。如果DCDC低压侧发生过压,车上的12V Ibooster有可能会产生失效,产生的危害是非期望的车辆减速度丢失(由于Ibooster失效导致的)。
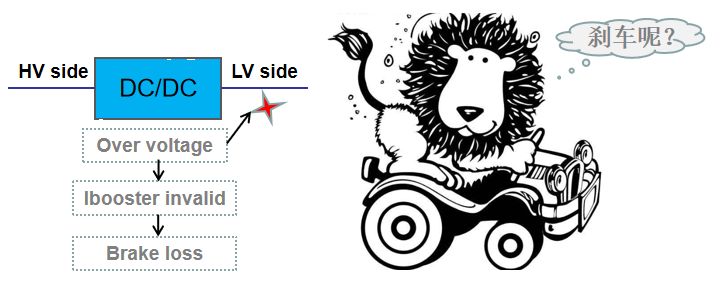
如果我们写的安全目标是避免非期望的车辆减速度丢失,DCDC开发工程师很难去理解DCDC 12V侧过压跟车辆减速度丢失有什么关系,很难去理解Ibooter是个什么东西。在他们的知识体系里是C语言, MOSFET, PWM控制这些东东。所以在DCDC这个子系统的功能安全开发中,我们的Safety goal应该写成:

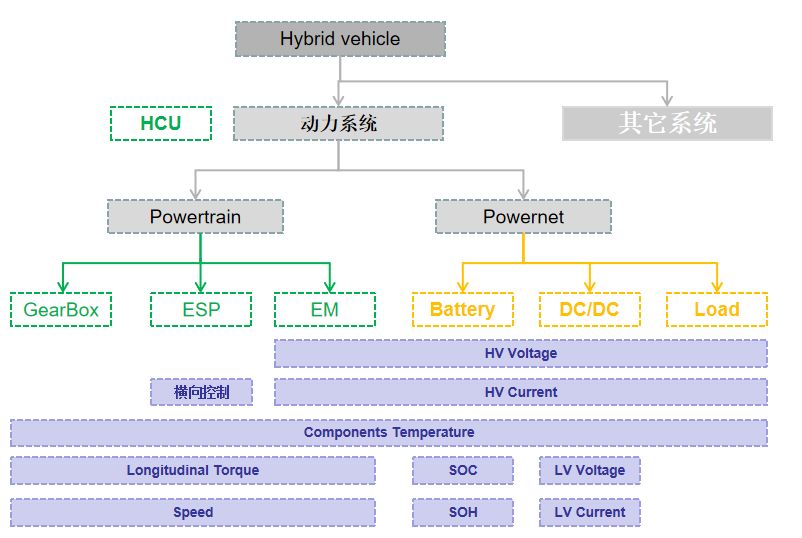
这里面涉及到一个Level分层问题,说白了就是各司其职,各自管好自己的圈和地儿。在Hybrid system HCU层面的关键词是扭矩和转速的控制,ABS层面是纵向减速度控制,DCDC层面是高低压侧电压电流这些控制量。
需要补充一点的是,12V电压过压时,iBooster不一定会完全失效,会由电助力建压慢慢切换到机械建压,提供必要的机械制动力。切换过程中,有可能会产生减速度不足的情况,但是不一定会导致减速度丢失。6. 确定功能安全需求(Functional safety requirements)
在安全目标(Safety goal)和安全状态确定以后,必须在其基础上进一步对故障检测,容错机制提出细化的技术要求,形成功能安全需求(FSR)。结合系统的初步架构设计,形成功能安全概念(Functional safety concept)。
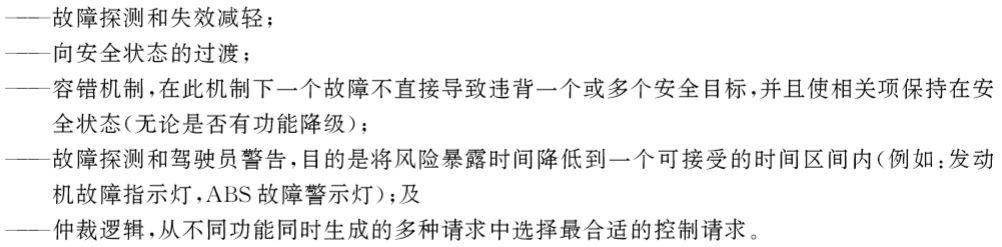
ISO26262中提到了,完整有效的功能安全概念应当包括:
(ISO2626-第三章7.1)
所以开发的结构顺序变成了如下图所示,一个Safety goal不止一个功能安全需求,同样地一条FSR也可以对应多个Safety goal。

下图给出了功能安全要求的结构和分布的说明,将功能安全要求分配给初步架构要素。

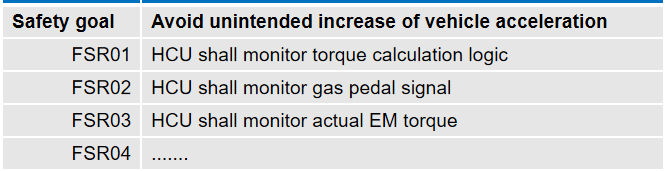
接着扭矩安全的Case,我们整理下功能安全需求,如下图所示。如果分析的对象是上层控制器,FSR中的描述针对的都是HCU如何实现。这里还没有涉及到FSR的分配,这一部分又有不小的工作量。
如果我们的分析对象是针对电机控制器,分析过程如下表所示。我这里写的FSR不一定合适,颗粒度把握和描述是需要仔细斟酌的,但是电机系统(Motor+Inverter)里,FSR都应该是针对这个子系统的,比如电机转速传感器、直流母侧电流,这些信号和电机扭矩是直接相关的。

但是这里仍然有个问题,你的FSR怎么算是写的全了呢?怎么就是表述和范围清晰的呢?在这里,就要用到2个方法:FMEA和FTA
FSR完成以后,下一步就进入到ISO26262第四章的部分:产品系统层面开发。在这个Case study的最后一期,我们要基于FSR和FSC做技术安全需求和功能安全的系统设计。
这2期花了很多时间来整理功能安全的思路和流程,写了很多废话关于FSR,SG这些概念之间的关系。Anyway功能安全活动的流程和思路理清楚了,后面就是Case by Case分析以及不断积累的过程了。
持续改进,不断学习,咱们下期继续。
- 用户评论




