ADAS/AD开发17- 安全角度
前言
智能驾驶从L3级别开始,就要由智能驾驶系统(下文简称“系统”)承担责任了。
因此,“安全”是智能驾驶系统顺利落地、智能驾驶行业顺利发展的无法回避的关键话题。
对于智能驾驶安全,传统的功能安全设计是无法覆盖L3及以上智能驾驶诉求的。因此需要从新的角度审视安全。例如,我国已经开始立法来规范目前火热的汽车智能化的趋势,名字叫做智能网联汽车,强调自动驾驶和车联网两个发展方向。那么智能网联汽车的安全势必要考虑网络安全的因素(联网),以及因自动驾驶分级导致的新的安全需求(接管)。
正文
一、概念介绍
按照SAE的自动驾驶级别划分,如下图,智能驾驶系统在运行过程中会牵涉到驾驶责任(驾驶员/系统)和系统作用域(ODD)的切换。这个切换,可能是成功的,也可能是失败的。切换成功,那是应该的;切换失败,就算是另一种“失效”了,是无法接受的。这样,就牵涉到安全!但是,这个安全跟“功能安全”没有关系,属于新增的需求。
 图1 自动驾驶分级
图1 自动驾驶分级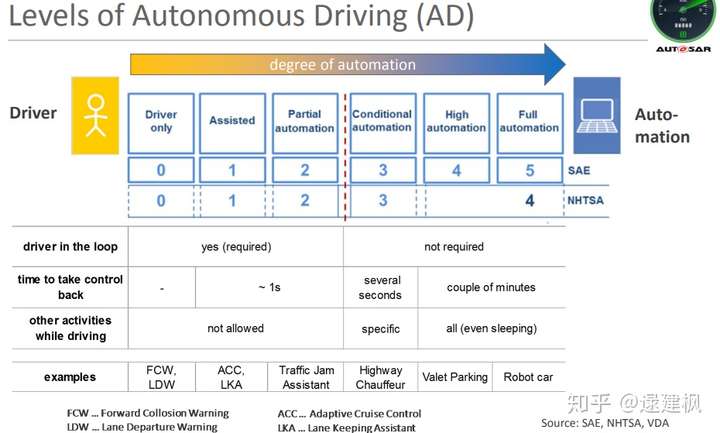 图2 不同等级对驾驶员的要求
图2 不同等级对驾驶员的要求
罗列自动驾驶概念开发阶段常用的几个概念(DDT/OEDR/ODD/MRC/Fallback/MRC):
DDT - Dynamic Driving Task 动态驾驶任务,完成车辆驾驶所需的感知、决策和执行,包括但不限于:控制车辆横向运动;控制车辆纵向运动;目标和事件探测与响应;驾驶决策;控制车辆照明及信号装置。
OEDR - DDT包含一项目标和事件探测与响应的子任务,缩写为OEDR,全称是Object and Event Detection and Response。其实就是感知任务。系统可以负责OEDR,当然人也可以负责OEDR,例如一辆没有ADAS功能的车,不一直都是人负责“目标和事件探测与响应”的嘛?
ODD - 设计运行范围,英文全称 Operational Design Domain。设计时确定的驾驶自动化功能的运行条件。
Fallback - 接管,全称Dynamic Driving Task Fallback(即DDT接管)。当车辆超出ODD时,或者DDT相关系统失效时,由人或者智能驾驶系统执行动态驾驶任务接管(即便由系统接管,肯定也不可能维持之前的驾驶状态了。例如,系统本来执行的DDT是HWP,突然系统出问题了,这个时候系统会执行Pull over紧急靠边停车等DDT。Pull over是一种后备DDT,可将车辆和人员的风险降低到最小,即最小风险状态,缩写MRC,英文全称Minimal Risk Coondition)
接管的过程如下图所示:
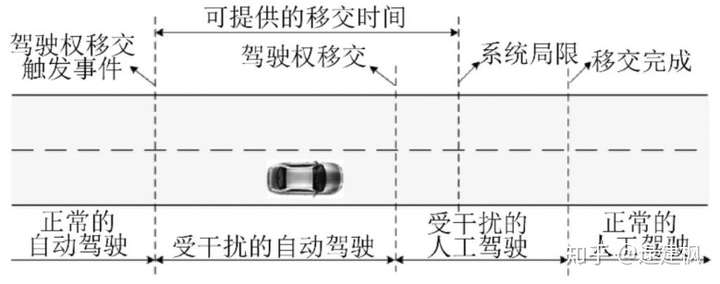 图3 来自《上海汽车》泛亚汽车技术中心有限公司的毛向阳、尚世亮和崔海峰的文章截图
图3 来自《上海汽车》泛亚汽车技术中心有限公司的毛向阳、尚世亮和崔海峰的文章截图
利用以上概念,对自动驾驶系统进行分析,然后按照以下几个维度进行最终的L0-L5的自动驾驶评级。
持续的纵/横向控制维度 (由系统?还是人类?)
OEDR维度 (系统?人类?)
DDT-Fallback维度(系统?人类?)
ODD维度 (系统?人类?)
还有推荐考虑地理围栏(Geofence)维度来帮助分级的。所谓地理围栏,就是指在一定地理区域内,智能驾驶汽车的各种运行状态都受到电子监控。
个人认为,地理围栏应该属于ODD的深化和细分,限定场景和工况。
 图4 纵目科技在智东西上分享的地理围栏分级
图4 纵目科技在智东西上分享的地理围栏分级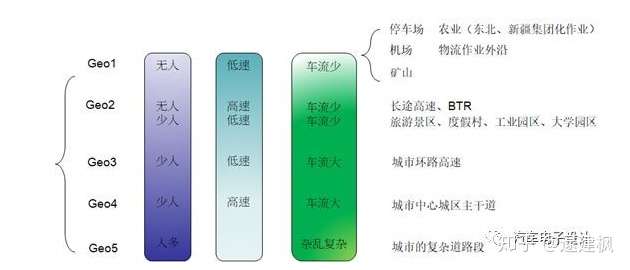 图5 汽车电子设计微信公众号上关于地理围栏的说明
图5 汽车电子设计微信公众号上关于地理围栏的说明
二、围绕安全开发的常见安全元素:
按照NHTSA发布的《AUTOMATED DRIVING SYSTEMS 2.0 - A Vision for Safety》自愿性指导书的分类,可以将ADS安全元素分为以下几个维度来考量:
系统安全 System Safety;
设计运行范围 ODD;
目标时间检测及响应 OEDR;
接管 Fallback(MRC);
网络安全 Cybersecurity;
数据记录 (EDR 车载黑匣子);
防撞性 Crashworthiness;
碰撞后分析 Post Crash Behavior;
检验方法 Validation and Testing;
人机接口 Human Machine Interface(HMI);
消费者教育和培训 Consumer Education and Training;
联邦、州和地方法律 Federal, State and Local Laws。
三、智能驾驶常用安全相关的设计方法论(方法的方法):
功能安全(Functional Safety : ISO 26262)
预期功能安全 (Safety Of The Intended Function - 即SOTIF : ISO/PAS 21448)
网络安全 (Cybersecurity:ISO/SAE CD 21434)
传统的主动安全及被动安全 (ABS/ESP, Occupant Restraint System, etc.)
其中,功能安全主要覆盖电子电器系统故障(系统性故障+硬件随机故障)引起的危害。功能安全默认是人在驾驶,人在主导整个操作过程。一旦系统出现故障,驾驶员默认能够非常称职地参与危害的控制;
预期功能安全主要覆盖电子电器系统非故障引起的危害。例如,1. 车辆运行过程中超出了ODD范围,需要驾驶员接管(但是系统本身并无故障,并不算是“失效”),而且这个接管过程需要一定时间。在这个接管的过渡时间中,要保证系统能够“Hold住”,这就对系统提出了新的安全要求;2. 视觉感知系统将一个救护车误认为是一辆普通的卡车,而导致车辆没有给救护车让道,电子电器系统没有任何失效,但是确实形成了某种危害。一般的SOTIF的验证都是围绕ODD/OEDR/Fallback等这几个关键词引申出来的含义展开的。比如,系统性的把智能驾驶系统暴露出ODD,看看系统接管的性能是否OK;系统性的训练和测试系统的OEDR能力(感知极端工况),看看系统的响应是否正确。
网络安全主要覆盖因车辆联网导致的外部网络恶意对车辆、账户或隐私进行攻击,而引起的危害。例如,可以通过限制系统的诊断者和调试权限来减少被攻击的程度。类似的做法还有:限制诊断权限;任何有权限访问车辆运算平台的密码都需要注意隔离和保护;控制外界访问固件的权限;记录访问历史;控制无线接口等等...
四、智能驾驶系统常用的安全设计手段
1. 系统本身的多样性和系统冗余:
多样性(Diversity)个人感觉主要指感知这块(传感器的种类),比如检测车道线,用了视觉传感器检测(前视摄像头),再来一个激光雷达检测,针对车道线检测这块儿内容,就多样化了起来。毕竟不同的传感器有不同的失效模式,只有组合使用,才能保证感知数据流的万无一失。其实也是另一种形式的“冗余”吧!
系统冗余(Redundancy)主要是为了提高系统可靠性,一般通过将功能部件加倍的方式实现。智能驾驶系统落地的一大拦路虎就是成本高。成本高的其中一项原因就是“冗余”多。在ADAS阶段,人是驾驶的责任方,因此一旦系统搞不定某种驾驶状态,就可以由人来接管。这里面,人其实也是智能驾驶系统里的冗余设计(的一部分)。例如感知层面(OEDR),系统看不到的东西或者误检测的东西,人能分得清,人就会介入;计算层面,系统算的不准,控制的不好,人也可以介入纠正车辆运行状态;执行层面,例如刹车的ESP(电子电气部件)坏了,没了助力,但是人可以硬踹刹车踏板(没了助力而已),让车停下来,转向也是同理。在AD阶段,就需要系统负责了,那么没了人做备份,还能用什么来代替人类作用呢?答案是:再弄一个系统... 也就是冗余系统(或部件)啦。(将冗余进行到底!)
冗余的计算单元。搞两个车规级的计算机(或者同一个计算单元有冗余核心芯片、冗余电源等类似两个独立计算单元的设计)。一个挂了,另一个顶上;
冗余的制动系统。例如典型的博世制动冗余解决方案: ESP + iBooster;
冗余的转向系统。3相、6相、12相电机绕组;双份控制单元...
冗余的定位系统。比如基于信号的定位(GPS或RTK)的绝对定位;基于视觉的道路特征定位;基于Lidar的SLAM定位;基于IMU的定位。或者基于以上各种定位排列组合出的各种组合定位方法等等。
冗余的电源模块。
冗余的AEB系统。除了上面冗余的两个域控制器外,还要再搞一个冗余的、一直在保持工作的节点(控制器,例如智能前视摄像头模块),来独立检测目标并随时准备做紧急制动。假如两个域控制器都挂了,或者视决策算法出现失误,例如,可以让ADAS常见的1R1V方案形成一个小的子系统,独立于大的ADS(自动驾驶系统)之外,做冗余紧急刹车。
冗余的通信架构。比如,两路CAN(CAN主和CAN备份),CAN备份上挂一些关键节点,如ESP、EPS...不要把所有相关节点都挂上去(没必要)。
“冗余”的传感器架构。其实就是上面文章讲过的感知多样性!什么摄像头啊、毫米波雷达啊、激光雷达啊、超声波雷达啊、IMU啊、高精地图啊、甚至V2X啊等等能上的都上。讲究的是种类的不同。不过整个传感器架构的成本嘛,你懂得...
2. 数据记录及碰撞分析:
全程Data Recording and Post-Crash Behavior analysis。主要是对智能驾驶系统的数据进行保存并记录到云端后台(包括碰撞事故后的碰撞行为分析),用于优化智能驾驶系统使用。
3. 人机接口的相关安全设计(HMI):
比如,Fallback时,怎么增加一些配套设计,来提醒驾驶员快速地从智能驾驶系统手中来接管车辆。比如,允许驾驶员方向盘脱手后,方向盘振动这招儿就不管用了,无法提醒到驾驶员,可能就需要搞个座椅振动来提醒。
比如,仪表盘界面在人工驾驶和智能驾驶系统驾驶时,要让驾驶员明显的区分出来,做到心中有数,能够一眼就看出来当前是谁在控制车辆。
比如,系统正驾驶车辆时,人手贱(没注意),打了方向一下,结果系统以为人要接管,立马退出了...因此要把方向盘上植入一些压力传感器,检测人握住方向盘的明确信息,如果人要接管,必须有明确的手握方向盘的动作,才算给系统的明确输入,系统才会退出。
4. 法律法规的相关安全设计:
安全设计还有一个维度,就是对法律法规的遵守。例如智能驾驶系统在控制车辆时,如果后面呼啸而来一辆救护车,智能驾驶系统可以识别并响应这种场景,做到避让,而不是堵在前面,甚至可以靠边停车。
比如准确根据地理围栏信息,识别车辆是应该靠左驾驶还是靠右驾驶等。
////////////////////////分割线:以上内容发布于2019.01.28 后续有更新会继续完善。毕竟安全是一个很大的话题 //////////////////////////
////////////////////////分割线:2019.01.29 更新 //////////////////////////
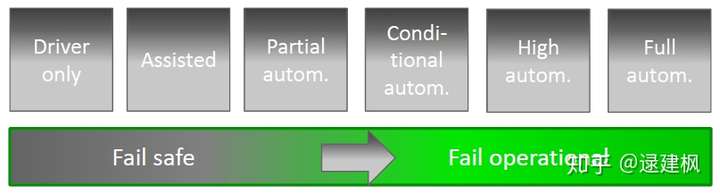
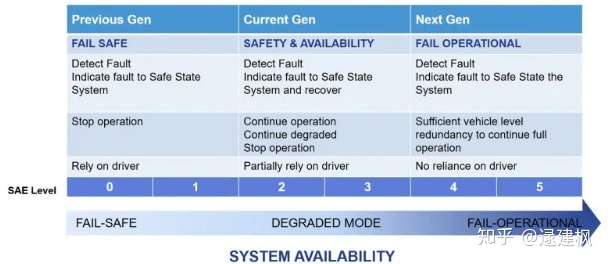
五、智能驾驶系统安全的演化路径 - 从Fail-Safe到Fail-Operational:
Fail-Safe System (失效保护系统)的特点:
Deactivate / Degrade function
即功能退出或功能降级。功能退出,即让系统稳定到一个Safe State安全状态(注意,只是保护系统自身!也就是说系统它发现它自己“生病”了,然后就报告老板:“我生病了,先回家了”然后工作一撂,头也不回地回家了...);功能降级跟上面类似,虽然没有“回家”,但是换成跟老板讲“这个工作搞不定了,不搞了”。
Report a diagnostic error 报告并记录一个诊断故障
Inform the driver 通知驾驶员
评价:这种系统设计显然无法满足前文提到的L3-L4-L5级别自动驾驶要求的Fallback(MRC)设计需求。因为驾驶员还没反应过来,你系统直接撂挑子了,不给个缓冲时间,也不负责把车降低到最小风险状态(靠边停车),不得出事故啊!
Fail-Operational System(失效工作系统)的特点:
Fail-Operational 经常在航空设计中使用。就是发生故障了,也得“带病工作”,不能请假!坚持把飞行任务完成,或者坚持让飞机顺利降落。
在Fail-Operational系统中,Safe State有了更高的要求,其实就是对标MRC最小风险状态的要求:
L3级要求7-15秒的系统“带病”驾驶,并等待驾驶员在环(Driver in loop);L4-L5要求几分钟的系统“带病”驾驶能力。
假如驾驶员仍旧不理会系统的报警请求,那么L4-L5级自动驾驶系统就会自动执行靠路边停车(Pull Over)。L3级别(TJP)可以直接停大马路上,至于有追尾的危险,对不起,系统没那么大能耐了,驾驶员自求多福吧!
Fail-Operational系统的冗余程度:
上文已经介绍了系统冗余设计,但是,为什么要那样设计呢???
2oo3冗余方案。在航空航天领域,关键组件的冗余都是3倍冗余(triple redundancy)。然后搞一个投票器(Voter)来对比三者之间的输出,做真实性校验(plausibility check)。这种设计方式叫做“two out of three system approach”, 即2oo3冗余方案。即便一个挂了,另外两个仍旧能够输出经过真实性校验的稳定输出,系统完全不需要Fallback,继续飞行就可以了;待飞行结束后,再维修坏掉的组件就可以了。
但是,2oo3冗余方案的成本太太太高了。民用汽车不可能采用这种设计方法。
1oo2D冗余方案。所以,汽车行业搞了一个“简配版”方案,“one out of two with high diagnostic coverage”方案。这个1oo2D方案跟2oo3方案不一样的点在于,相互之间要以更高的诊断覆盖率来相互校验对方,检查对方是否“挂了”。如果一个组件失效了,还有另一个组件撑着。
这个方案虽然不如2oo3方案完美,但是已经足够满足Fallback(MRC)需求了。而且成本优势明显。(不考虑成本的量产项目都是耍流氓!你又不是NASA和军方,你只是盈利性民营企业,要自负盈亏的)。
1oo2D*冗余方案。跟上面类似的方案,但是为啥要加个星号呢?其实这个方案就是上文提到的最流行的冗余方案:2个域控制器(two computer)+1个智能前视摄像头模块(one smart sensor)的配置。一个域控制器挂了,还有另外一个正常工作;且正常工作的域控制器还可以与智能前视摄像头模块校验数据。smart senor(智能前视摄像头模块)中也有一些关键功能(感知直接来自自身数据,不依赖外部,比如智能前视摄像头模块本身就采集视频数据),比如AEB紧急制动之类的。可以在控制器们都有问题后执行紧急操作。
- 用户评论




