
智能网联汽车的发展将为汽车、通信、电子、互联网等技术密集型行业孕育新的发展动力,也将成为解决环境、能源、拥堵、安全等社会问题的关键手段。作为汽车产品的终极形态,智能网联汽车已成为世界各国争相抢占的发展战略制高点。汽车产业格局下的创新链、价值链、生态链的重构与变革已成为不可逆的趋势。
智能网联汽车的智能化技术是基于车辆搭载先进的传感器、控制器、执行器、软件算法,使汽车可以自主通过感知系统与信息终端系统实现车—车、车—人、车—环境的信息交互,从而自动完成车辆的识别、感知、决策以及控制,最终代替驾驶员操作实现无人驾驶。
智能网联汽车的网联化强调的是车辆接入网络,它包括行人、车辆、路测设备、网络中心、智能交通监管系统等,主要实现车内网络与车外网络之间的信息交换,解决人—车—环境的信息交换问题
以上内容摘自《智能网联汽车技术》,有了智能网联汽车的基础概念之后,然后再谈信息安全问题的话,在汽车资产和威胁场景的描述上就比较完备了。在此我们隆重的推出ENISA去年发布的《ENISA Good practices for security of smart cars》。
其实早在四月青骥安全公益组的小伙伴(龚恒毅@MonsterGon)就将原文翻译出来了,但一直找不到合适的推送方式,索性放下包袱,直接将译文分主题的方式分享给大家,希望大家对智能网联汽车以及相关的信息安全话题有所了解。今天推送的主要内容还是智能网联汽车在ENISA里的基础介绍。

智能汽车:联网和(半)自动驾驶汽车
1.1定义
SAE J3016标准为道路车辆定义了6个等级的驾驶自动化,从完全没有驾驶自动化的0级到完全自动化且不需要驾驶员的5级,如图2所示。 图2: SAE J3016中定义的SAE车辆自动化水平 尽管提供的建议和良好的实践可以适用于所有车辆(即无论自动化水平),本研究侧重于半自治和自治的汽车,这也被称为自动驾驶系统车辆(ADS-DS) SAE J3016标准,以及V2X通信,定义如下:•半自动汽车(自动化程度为4级):指为了能够在特定条件下(例如在特定类型的道路上)自动(即不需要人工干预)执行所有驾驶功能而配备大量传感器的高度自动化汽车。•自动驾驶汽车(自动化程度第5级):指配备大量传感器的全自动汽车,以便能够在任何条件下(即在任何时间和任何道路上)自动执行所有驾驶功能。这些汽车甚至可能不包括方向盘或油门/刹车踏板。•V2X通信:指车辆与任何其他实体之间的数据交换(例如道路基础设施、另一车辆、行人等)。它涵盖了V2V(车对车)通信和V2I(车对基础设施)通信的概念。在本研究中,术语V2I指的是车辆与其周围环境之间的所有通信,V2V通信除外。因此,V2I包括V2P(车辆对行人)和V2N(车辆对网络)通信。为了实现V2X通信,车辆配备了不同的无线通信系统,如专用短程通信(DSRC40)、可见光通信(VLC)、图像传感器通信(ISC)、Wi-Fi或移动通信技术,如3G、4G和5G。这项研究对实际使用的通信技术是不可知的。图3给出了描述系统和应用的智能汽车生态系统的概述车内和车外。
与其他用户共享。本研究不关注特定的用例,如连接信息娱乐和特定的车载通信。为了提高自动驾驶能力,智能汽车依赖多种技术,包括:•传感器和执行器: 具有各种功能的设备,如感知和检测对象、执行器等。•人工智能: 使ECU和计算机能够执行通常与智能人类相关的任务的算法。•机器学习: 使计算机能够行动并增强其预测事件或情况的能力的算法。•云计算:允许访问共享资源集(如服务器和应用程序)的解决方案,对管理工作和服务提供者交互的要求最低。•通信和/或网络:允许不同实体之间进行数据交换的无线电技术和通信协议。
1.2高层次参考模型
智能汽车,尤其是(半)自动驾驶汽车,包括一些ecu和零部件,乍一看可能过于复杂。虽然智能汽车的功能(如制动、转向、门锁等)在整车上是相同的,但是每个OEM都有自己的车载架构,没有通用的、独特的架构可以作为参考模型。图4展示了ENISA为研究定义的高级功能模型,该模型基于对相关工作的广泛回顾,并经过了专家的验证。该模型的目的是提供智能汽车技术及其相互作用的一般概述。需要注意的是,该模型只是指示性的,并不反映各种汽车架构的复杂性;它的目的是在一个高级视图中封装后者的主要元素。该模型提供了不同功能、使用的技术和提供智能汽车主要功能的最重要组件的概述。 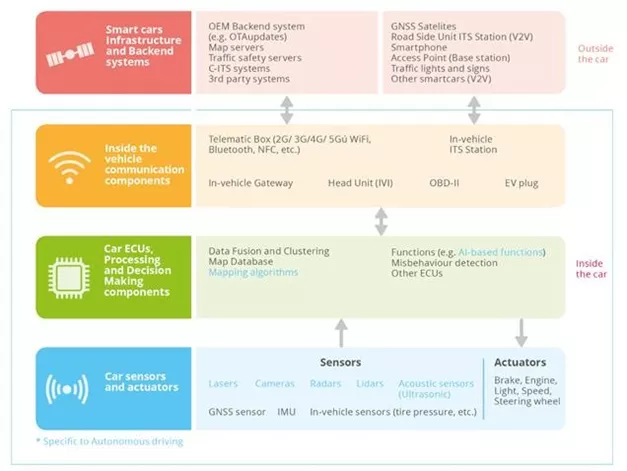 图4:高级智能汽车参考模型高层参考模型由四层排列顺序,最低三层是智能汽车的一部分,而上层代表组件之外的实际控制汽车,但这是环境的一部分,如限制和地图服务器实例。除了图4所示的组件和技术外,智能汽车还包括一些关键功能(如加速、刹车、目标检测、导航等),这些功能应该受到保护,以抵御网络攻击。事实上,改变这些功能的操作可能会导致意外情况(例如车辆碰撞或碰撞),可能危及道路使用者的安全。•汽车传感器和致动器: 最低层的体系结构包括各种智能汽车传感器用来监测车辆的驾驶环境中通过收集数据环境,如路况,距离其他对象和车辆,全球导航卫星系统(GNSS)的立场,以及不同的执行机构,执行必要的操作。•汽车ECU、处理和决策组件: 这一层包括所有硬件和软件组件,包括人工智能、用于处理接收到的数据图层汽车传感器和致动器(即智能汽车传感器采集的数据)和车载通信组件(如数据来自其他这个站),采取适当的决策以及传输相关的执行机构。•车载通信组件:这一层包括不同的车载通信组件用于车载通信的通信组件(例如头单元,也称为车载信息娱乐(IVI)或车载网关),以及与外部组件(如其他车辆或rsu)的通信。
图4:高级智能汽车参考模型高层参考模型由四层排列顺序,最低三层是智能汽车的一部分,而上层代表组件之外的实际控制汽车,但这是环境的一部分,如限制和地图服务器实例。除了图4所示的组件和技术外,智能汽车还包括一些关键功能(如加速、刹车、目标检测、导航等),这些功能应该受到保护,以抵御网络攻击。事实上,改变这些功能的操作可能会导致意外情况(例如车辆碰撞或碰撞),可能危及道路使用者的安全。•汽车传感器和致动器: 最低层的体系结构包括各种智能汽车传感器用来监测车辆的驾驶环境中通过收集数据环境,如路况,距离其他对象和车辆,全球导航卫星系统(GNSS)的立场,以及不同的执行机构,执行必要的操作。•汽车ECU、处理和决策组件: 这一层包括所有硬件和软件组件,包括人工智能、用于处理接收到的数据图层汽车传感器和致动器(即智能汽车传感器采集的数据)和车载通信组件(如数据来自其他这个站),采取适当的决策以及传输相关的执行机构。•车载通信组件:这一层包括不同的车载通信组件用于车载通信的通信组件(例如头单元,也称为车载信息娱乐(IVI)或车载网关),以及与外部组件(如其他车辆或rsu)的通信。
1.3 智能汽车基础设施和后端系统
这一层包括与智能汽车直接通信的不同外部通信组件(如RSU、交通标志)或系统(如其他车辆、接入点、行人智能手机),以及远程为智能汽车提供服务的服务器和系统。其中包括用于无线(OTA)更新的OEM后端系统、地图数据服务器和第三方服务提供商的系统。资产分类。
为了解决智能汽车的网络安全问题,识别这样一个复杂生态系统的资产是至关重要的。分类的关键资产,应该受到保护,以确保高度安全的车辆被描述在图5中,和简要描述不同的资产提供附件A .尤其是智能汽车的功能(例如,障碍检测)是非常重要的,因为它们直接影响智能汽车的行为和可能危及乘客的安全。这些功能位于不同技术之间的十字路口,从传感器到通过基础设施组件的方式实现的基于人工智能的算法,在资产分类中列出了这些功能。这突出表明,保护智能汽车需要多学科方法,因为资产领域非常多样化。 以上,就是《智能汽车安全的良好实践》中关于智能汽车的基本介绍,在附录A,有详细的资产分类列表。