登陆
注册
浅谈预期功能安全(Safety Of The Intended Functionality)
来源:公众号“RAMS工程师”
2020-04-26
2113
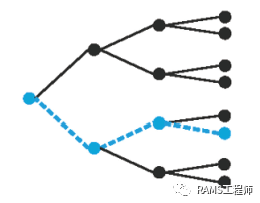
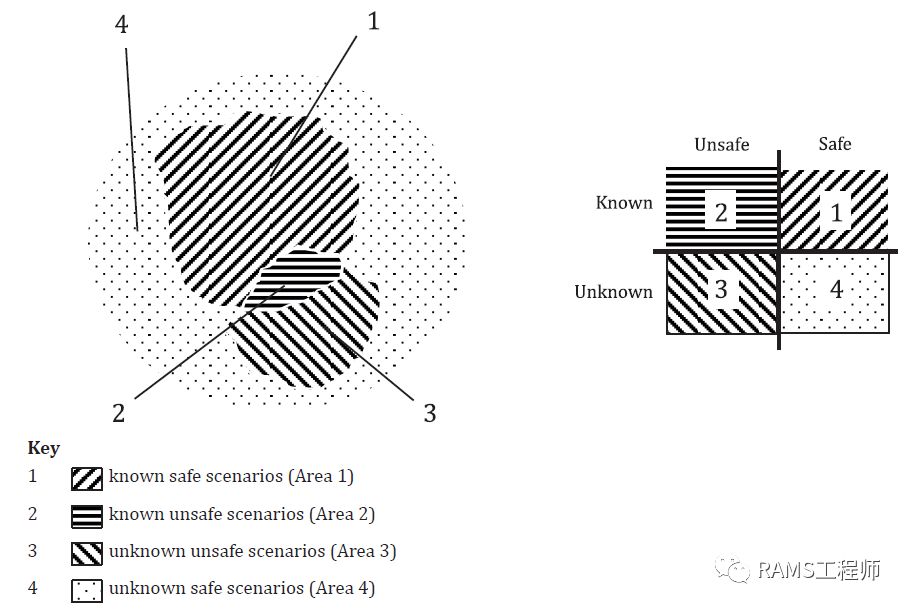
SOTIF在很大程度上基于假设场景(scenarios)来进行分析。ISO/PAS 21448对场景(scenarios)的定义是:“description of the temporal development between several scenes in a sequence of scenes”,即一系列片段(scenes)中几个片段(scenes)之间的时序发展描述,如下图所示。


ISO/PAS 21448《Road vehicles - Safety of the intended functionality》于2019年1月份正式发布,是截至目前唯一的SOTIF规范。该规范从设计、验证(verification)和确认(validation)等方面,提供了(尤其是在level 1和level 2中)实现预期功能安全所需的工作指南。

ISO/PAS 21448中定义的SOTIF相关活动如下图所示。(小编注:该图中存在一处笔误:中部的方框“Validation of the SOTIF”应为“Verification of the SOTIF”,参见小编标注出的红线。相信在下一版本中会有所更正。)

(图片来源:[1])


(图片来源:[1])
如何确保当前的用例(use case)、场景(scenarios)合理且完整?仿真是否切实可行?STPA是否切实可行?(小编注:关于STPA的介绍,可参见往期文章STPA:一款危害分析工具。) 谁来提(OEM?)、如何提SOTIF要求?是否应该有类似于ASIL级别的“SOTIF级别”?
如何评估、谁来评估SOTIF的分析结果? 对于level 3及以上,除了ISO/PAS 21448,还能参考哪些指南来考虑SOTIF?关于这一点,在该规范的Scope里也有所提及:“This edition of the document can be considered for higher levels of automation, however additional measures might be necessary.“ (小编注:这里的“higher levels of automation“指level 3及以上) 如何将SOTIF落地,如何与功能安全分析流程有效衔接。例如如何界定“非预期功能”,究竟该将其划分为故障(即ISO 26262的范畴)、还是划分为功能不足(functional insufficiencies,即SOTIF的范畴)。
[1] ISO/PAS 21448. Road vehicles - Safety of the intended functionality. 2019.
[2] Philip Koopman. Safety and Validation of Autonomous Vehicles. 2019. https://www.slideshare.net/PhilipKoopman1/safety-and-validation-of-autonomous-vehicles-june-2019?next_slideshow=1
[3] Technical Report- Taxonomy of Scenarios for Automated Driving. V1.2. 2017. https://s3-eu-west-1.amazonaws.com/media.ts.catapult/wp-content/uploads/2017/04/25114137/ATS34-Taxonomy-of-Scenarios-for-Automated-Driving.pdf
[4] General Motors. Self-driving Safety Report. 2018. https://www.gm.com/content/dam/company/docs/us/en/gmcom/gmsafetyreport.pdf
[5] Riccardo Mariani. Can we trust autonomous systems? 2017. http://www.icri-sc.org/fileadmin/user_upload/Group_VCI/Events/Kickoff_2017/Mariani_Intel_ICRI-CARS_kickoff_v1.pdf
--- END ---
预期功能安全
收藏
点赞
- 用户评论
2000
评论