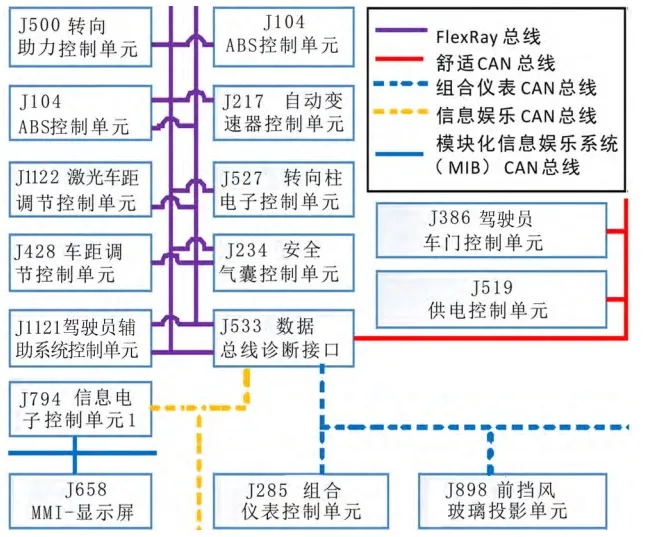
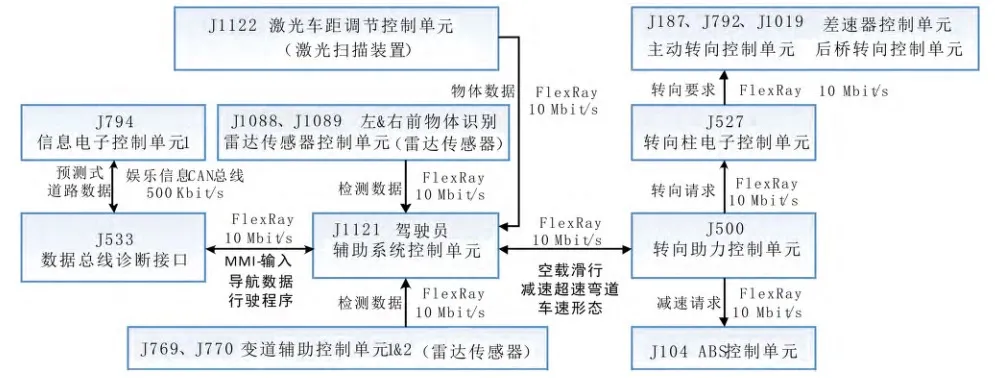
首先来看看驾驶员辅助控制系统单元和传感器,如图1所示,其中传感器分为两类,一类传感器数据有控制单元J1121直接读取,一部分传感器本身有处理单元,通过FlexRay总线将数据传输给控制单元J1121,J1121与外界的交互如图2所示。
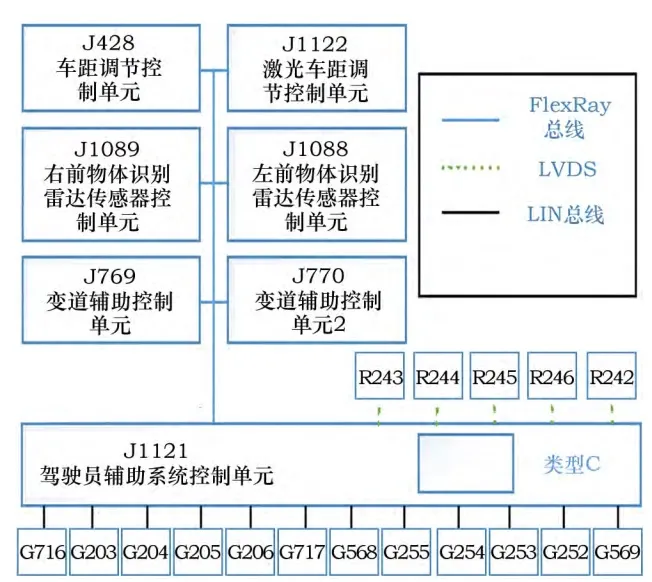
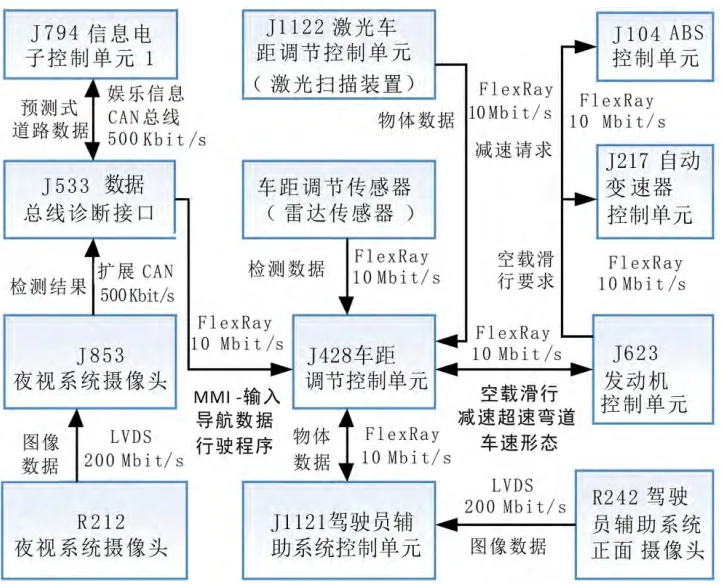
其中, G203~G206为 后 部 驻 车 辅 助 传 感 器,G252~G255为前部驻车辅助传感器, G568~G569为前部自动泊车辅助传感器,G716~G717为后部 自 动 泊 车 辅 助 传 感 器,R242为驾驶员辅助系统正面摄像头,R243~R246为周围环境摄像头。根据导航系统提高的道路数据,包括地形、道路状态(弯道、十字路口等)、车速限制等调车车辆,从而实现高效驾驶并减轻驾驶员的负担,控制原理如图3所示。
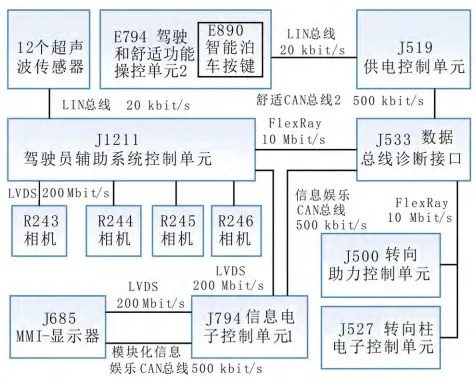
智能泊车辅助系统在下述泊车情形时为驾驶员提供帮助:倒车进入纵向停车位;前行退出纵向停车位;在先驶过横向停车位后前行进入横向停车位;未驶过横向停车位时前行进入横向停车位;倒车进入横向停车位。智能泊车辅助系统原理框图如图4所示。
横向辅助是一种新型驾驶员辅助系统,首次用于第五代Audi A8上,该系统可帮助驾驶员避免与前方横向通过的车辆相撞,主要是保证在视野受限的情况下,车辆的安全,包括的情况有十字路口,穿行窄出口等。横向辅助系统原理框图如图5所示。
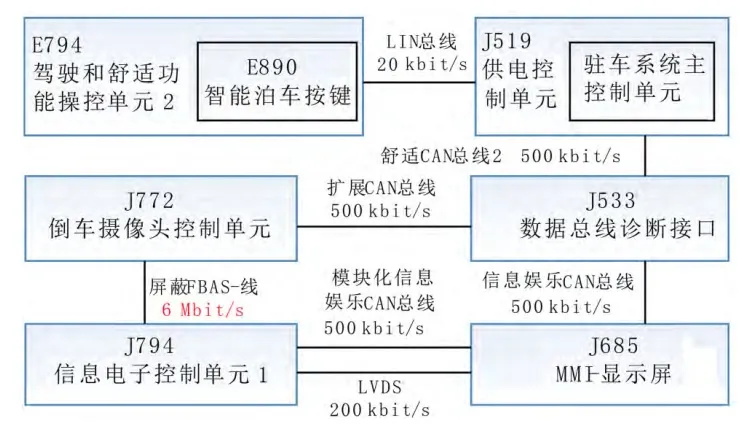
摄像头广角图像的修正、摄像头的校准以及摄像头上的辅助线投射,均由专用的倒车摄像头控制单元J772来完成。倒车摄像头的图像经屏蔽的FBAS-线直接被送到信息电子控制单元1-J794,图像从这里再经2根屏蔽的LVDS-线传至MMI-显示器J685,从而显示出图像。倒车系统原理框图见图6.

声明:本文内容及图片由BC-AUTO转载至网络, 信息来源于公众号汽车ECU开发。




