丰田如何从车载摄像头、卫星图像生成普通道路的高精地图
TRI-AD
2020年推出在高速公路上行驶的自动驾驶车Highway Teammate
AMP(Automated Mapping Platform)的计划进入正轨
与CARMERA的合作
2019年2月,TRI-AD与美国的CARMERA计划进行一项PoC,为城市和地面道路开发基于摄像头的实时更新的高精地图。这将成为测试TRI-AD开发的AMP开放式软件平台的第一步。CARMERA将提供“Street Intelligence Platform”用来生成大规模且高精度的自动驾驶地图。
在本次实地测试中,两家公司将在装有TSS(Toyota Safety Sense)的丰田车辆上安装摄像头,计划在几个月内从东京市区收集数据。另外,没有配套TSS的车队车辆将搭载后装的那种行车记录仪,在CARMERA的实时平台上处理这些图像数据,生成高精地图。
通过将本次实地测试中自动生成的地图与市场上的数字地图相结合,未来将有可能为AV提供更可靠的道路信息。通过从世界各地道路上的车辆上获取的数据自动生成高精地图,所有道路将都有望实现自动驾驶。

到目前为止,要生成可靠度高的自动驾驶地图,需要通过搭载极为昂贵设备的测试专用车辆(Mobile Mapping System)获取数据,且需要手工进行昂贵且耗时的地图的生成流程。通过与CARMERA合作测试自动生成高清地图,这些问题也将得到优化,降低成本并缩短开发时间。
与Maxar和NTT Data的合作
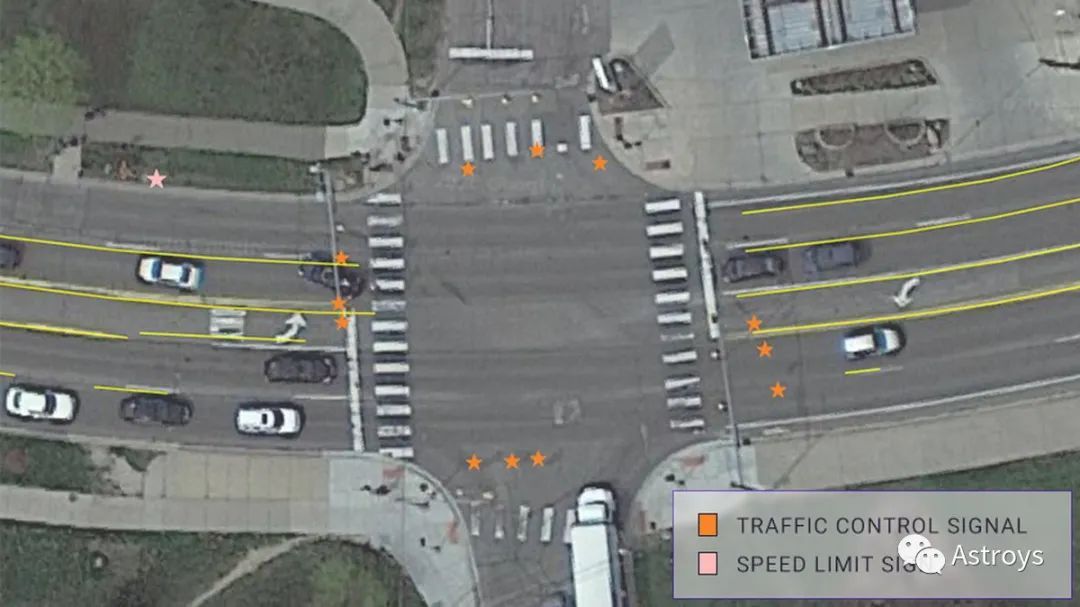
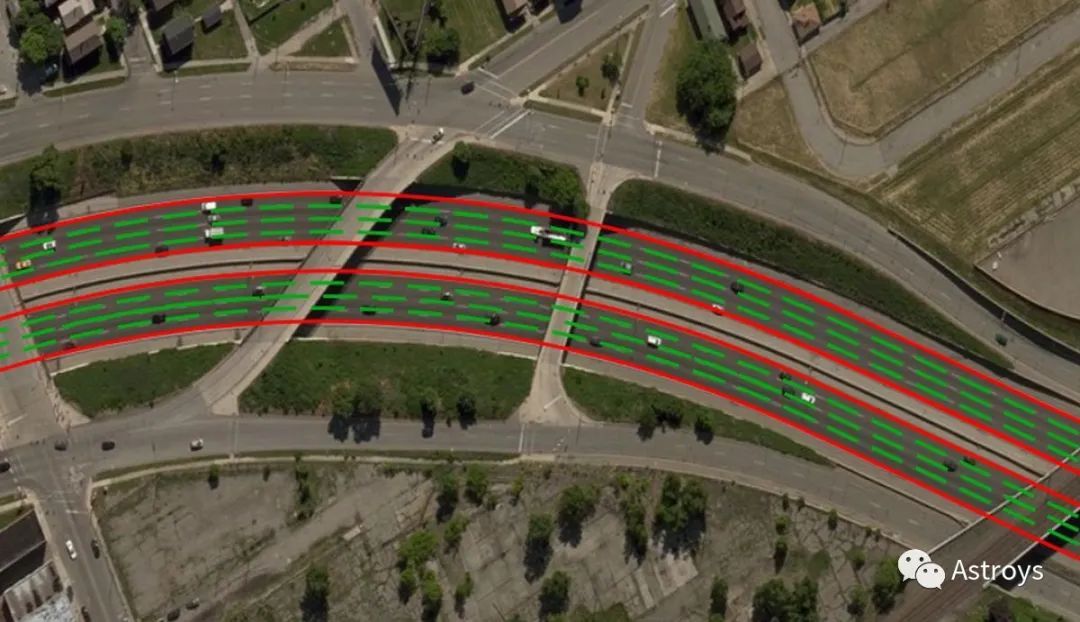
2019年4月,TRI-AD、Maxar Technologies和NTT Data三家公司宣布将进行一项PoC,使用高分辨率卫星图像为AV构建高精地图。
得益于当今电子和航空航天工程的发展,人造卫星的全球图像能以更高的分辨率和频率更新。另外,通过机器学习还能够自动发现并整合图像数据中道路元素的关联性。
由于AV通过使用多个实时传感器确保安全驾驶,因此这项利用卫星图像构建高精地图到努力,加上述与CARMERA的合作测试,将成为使TRI-AD的AMP开放式软件平台构想进一步实现的重要一步。
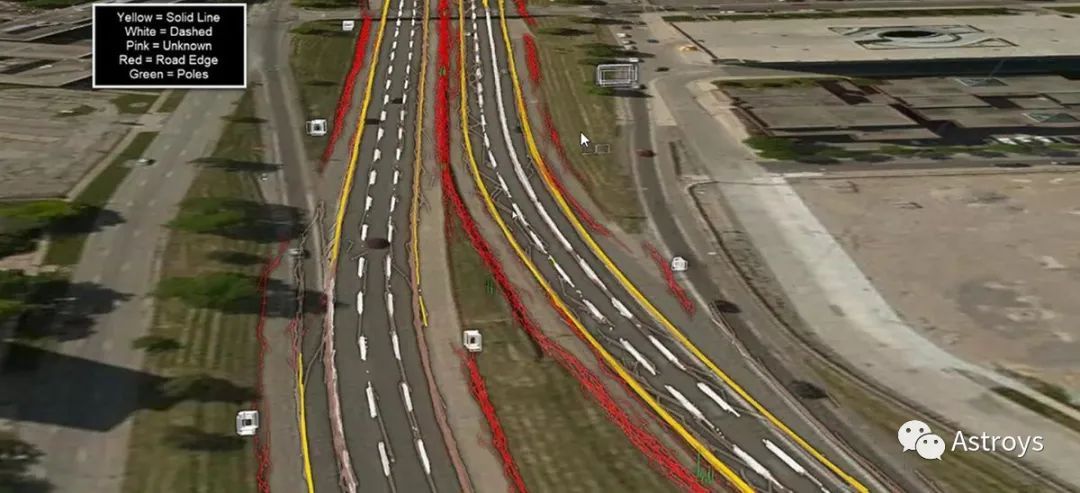
在本次测试中,三家公司将合作处理卫星图像,生成易于车辆使用的高精地图。首先,从Maxar基于云的地理空间信息云(GBDX)获取光学卫星图像库的图像。其次,通过使用NTT Data的AI的独有算法,自动抽取绘制路网所需的地图信息。然后,将TRI-AD绘制的自动驾驶高精地图从云端传送给丰田的自动驾驶测试车。


今后三家公司计划首先重点致力于自动生成东京特定区域的高精地图,未来逐步会在所有道路上实现自动驾驶。


声明:本文内容及图片由BC-AUTO转载至网络,信息来源于公众号Astroys。
- 用户评论










